Lors des cours Arduino au radio club, Yves, F4IMG, avait apporté un petit robot de sa conception.
Description détaillée par Yves de sa réalisation :

|
Réalisation d'un gyropode par Yves, F4IMG |
|
Crédit photos : F5PAX Film : F4IMG |
|
Lors des cours Arduino au radio club, Yves, F4IMG, avait apporté un petit robot de sa conception. Description détaillée par Yves de sa réalisation : |
|
|
|
|
|
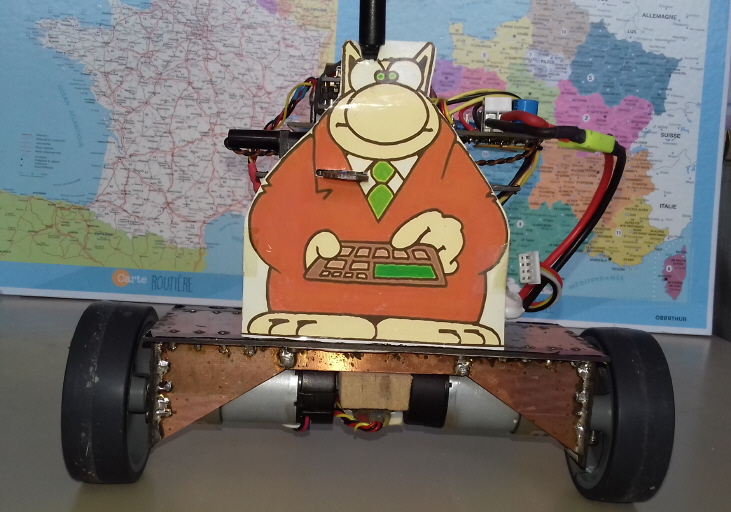
Le robot ne possède que deux roues (gyropode) et nécessite une petite phase d'initialisation afin que celui-ci conserve son équilibre. On peut apercevoir les moteurs aux extrémités des roues. Entre les moteurs, se trouve un module gyroscopique qui permet l'équilibre du robot et des capteurs à effet hall.
|
|
|
|
|
|
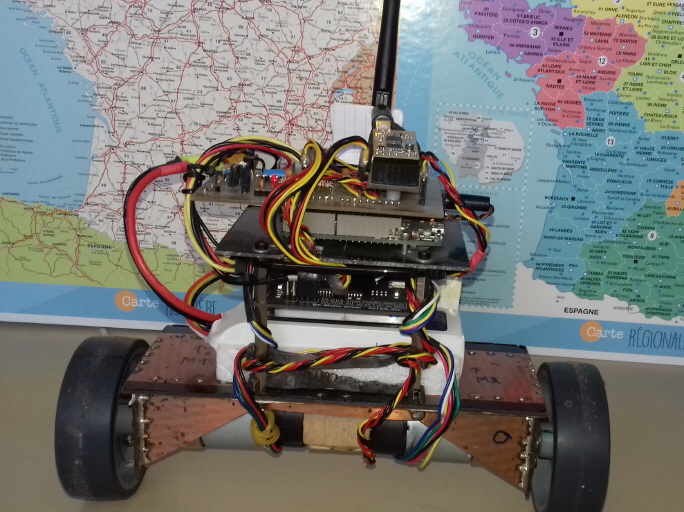
A l'arrière du robot, on peut apercevoir la partie électronique : les accus, l'ARDUINO, le récepteur HF de la télécommande (433 MHz).
|
|
|
|
|
|
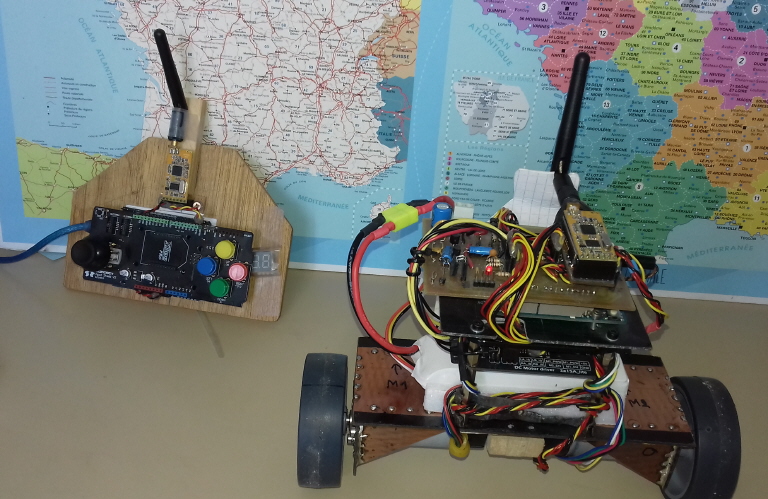
A gauche, la télécommande du robot.
|
|
|
Vous pourrez retrouver le film du fonctionnement du robot ICI |
|
|
|
|
|
A noter que tout est "home made", tant le robot, dont le châssis est réalisé avec des chutes de circuit imprimé, que le logiciel de gestion, développé par Yves. Le temps passé pour cette réalisation a été de trois mois. Toutes nos félicitation à Yves pour cette très belle réalisation. |
|
|
|
|
|
Dominique, F5PAX |
|
|
|
|
|
Mis à jour le 29/12/2019 |
|